Abstract
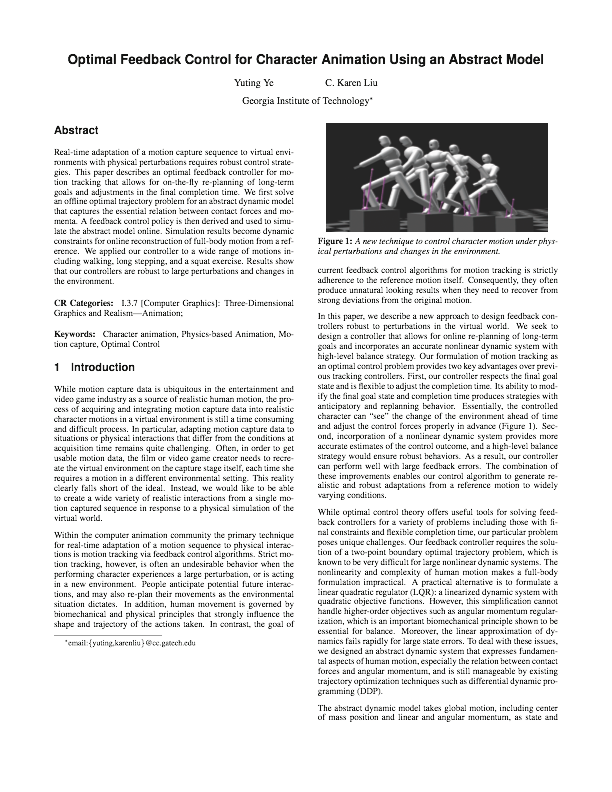
Real-time adaptation of a motion capture sequence to virtual environments with physical perturbations requires robust control strategies. This paper describes an optimal feedback controller for motion tracking that allows for on-the-fly re-planning of long-term goals and adjustments in the final completion time. We first solve an offline optimal trajectory problem for an abstract dynamic model that captures the essential relation between contact forces and momenta. A feedback control policy is then derived and used to simulate the abstract model online. Simulation results become dynamic constraints for online reconstruction of full-body motion from a reference. We applied our controller to a wide range of motions including walking, long stepping, and a squat exercise. Results show that our controllers are robust to large perturbations and changes in the environment.
Paper
Yuting Ye, C. Karen Liu
ACM Trans. Graph. (SIGGRAPH 2010) 29(4), Article 74.
Acknowledgements
We would like to thank Sumit Jain and Sehoon Ha for their help with video production and image editing. This work was supported by NSF CAREER award CCF 0742303.