Abstract
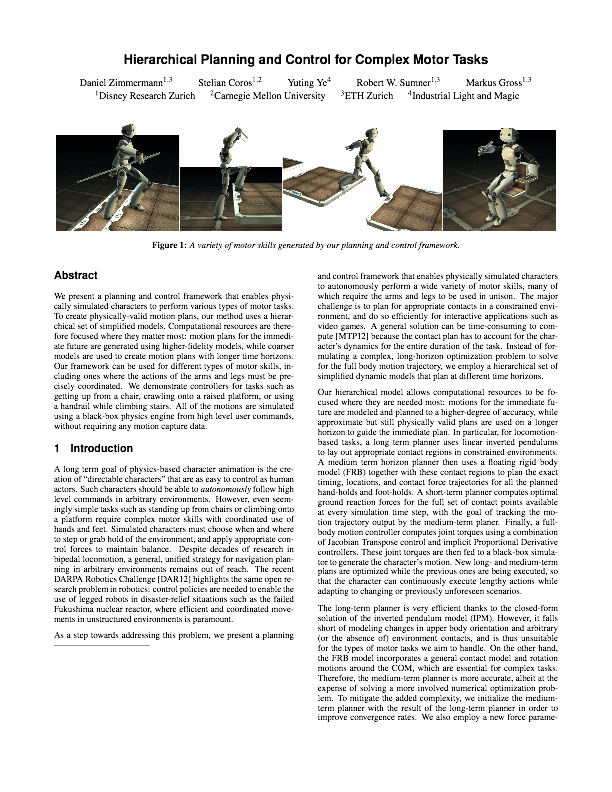
We present a planning and control framework that enables physically simulated characters to perform various types of motor tasks. To create physically-valid motion plans, our method uses a hierarchical set of simplified models. Computational resources are therefore focused where they matter most: motion plans for the immediate future are generated using higher-fidelity models, while coarser models are used to create motion plans with longer time horizons. Our framework can be used for different types of motor skills, including ones where the actions of the arms and legs must be precisely coordinated. We demonstrate controllers for tasks such as getting up from a chair, crawling onto a raised platform, or using a handrail while climbing stairs. All of the motions are simulated using a black-box physics engine from high level user commands, without requiring any motion capture data.
Paper
Daniel Zimmermann, Stelian Coros, Yuting Ye, Bob Sumner, Markus Gross
Proceedings of the 14th ACM SIGGRAPH/Eurographics Symposium on Computer Animation
Acknowledgements
We would like to thank the anonymous reviewers for their helpful comments and suggestions. Many thanks also to Maurizio Nitti for creating the DeeZee character model.
Project Members
Daniel Zimmermann
Stelian Coros
Yuting Ye
Bob Sumner
Markus Gross